Le positionnement GNSS (Global Navigation Satellite Systems) joue un rôle clé dans l’industrie des transports d’aujourd’hui, y compris la technologie UAV (Unmanned Aerial Vehicle).
Il a permis une navigation précise d’un point A à un point B dans le monde entier et a augmenté la sécurité des vols en évitant les zones d’exclusion concrètes préprogrammées (comme les aéroports, les zones militaires, les frontières des pays, etc.) ainsi qu’en permettant un suivi en temps réel.
Cependant, le GNSS présente également certaines vulnérabilités. D’une part, ses signaux radio sont susceptibles d’être brouillés ou falsifiés et d’autre part le GNSS ne fournit pas d’informations sur les objets mobiles environnants que le drone devrait contourner ou l’objet mobile dans lequel le drone devrait atterrir.
Concepts qui affecteraient un drone
Le brouillage et l’usurpation GNSS sont des concepts différents qui affecteraient un UAV de différentes manières.
Le brouillage serait l’interférence malveillante des signaux GNSS dans le but de faire perdre au récepteur GNSS la capacité de fournir une estimation de position, c’est-à-dire que le récepteur GNSS cesse de fonctionner.
D’un autre côté, l’usurpation d’identité est une attaque plus avancée dans laquelle « l’ennemi » génère de faux signaux GNSS qui émulent les vrais dans le but de générer une estimation de position spécifique dans le récepteur GNSS, c’est-à-dire que l’attaquant prend le contrôle du GNSS récepteur et indique à l’UAV qu’il est dans une position différente de celle où il se trouve réellement.
Bien sûr, ces attaques deviennent plus dangereuses dans les manœuvres qui se déroulent à basse altitude, principalement lors du décollage et de l’atterrissage. Une attaque d’usurpation d’identité indiquant à l’UAV qu’elle est plus élevée qu’elle ne l’est réellement déclencherait une réponse de vitesse souhaitée vers le bas, ce qui pourrait potentiellement faire s’écraser l’avion s’il n’est pas détecté à temps. C’est pourquoi dans certaines missions critiques, ne pas dépendre du GNSS pour les manœuvres de décollage et d’atterrissage est une exigence de base essentielle.
En dehors de ces problèmes, si l’avion doit atterrir automatiquement sur une plate-forme en mouvement, les choses se compliquent. Dans ces cas, une mesure de position relative est essentielle, car elle permettrait au drone d’effectuer les corrections nécessaires pour adapter sa vitesse à la position de la plate-forme mobile pour un atterrissage très précis.
Pilote automatique Veronte et sa compatibilité avec le système Internest
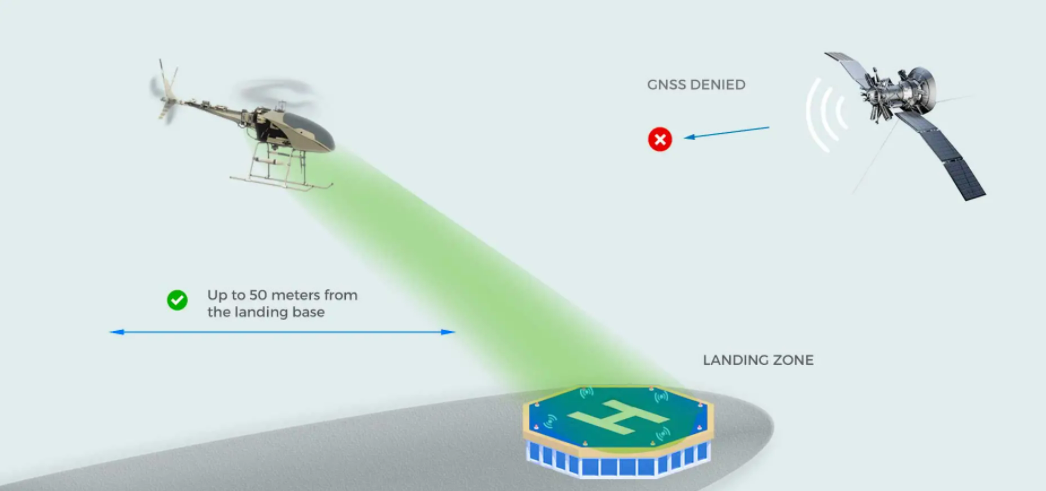
Atterrissage dans des véhicules en mouvement dans des environnements GNSS refusés – Veronte
Ces atterrissages refusés GNSS dans des véhicules en mouvement sont réalisés dans le pilote automatique Veronte grâce à sa compatibilité avec le système de mesure de position relative Internest, dont les mesures sont entrées dans notre estimateur de filtre de navigation interne. Le système Internest repose principalement sur des signaux ultrasonores pour l’approche rapprochée, atteignant des distances allant jusqu’à 50 mètres de la base d’atterrissage.
Le pilote automatique Veronte peut être utilisé pour naviguer à proximité de la base d’atterrissage à l’aide de signaux GNSS standard et une fois que l’avion est dans la couverture du champ d’action des capteurs Internest, il peut passer en navigation relative complète.
La combinaison Veronte-Internest manifeste notre engagement avec une navigation et des atterrissages plus sûrs et plus précis.
